پرواز خیره کننده جمعی رباتهای پرنده در جنگل!/ ویدئو
محققان دانشگاه ژجیانگ در هانگژو چین موفق شدند ۱۰ پهپاد مستقل و هوشمند را در یک جنگل انبوه و ناآشنا به حرکت درآورند.
اگر یک هواپیمای بدون سرنشین بخواهد وظیفهای را بر عهده بگیرد، باید آنقد هوشمند باشد تا بتواند بخوبی از عهده این کار بربیاید. محققان چینی به تازگی دستهای از پهپادها را به نمایش گذاشته اند که میتوانند به طور جمعی در جنگلهای انبوه حرکت کرده و از موانع مسیر به راحتی عبور کنند.
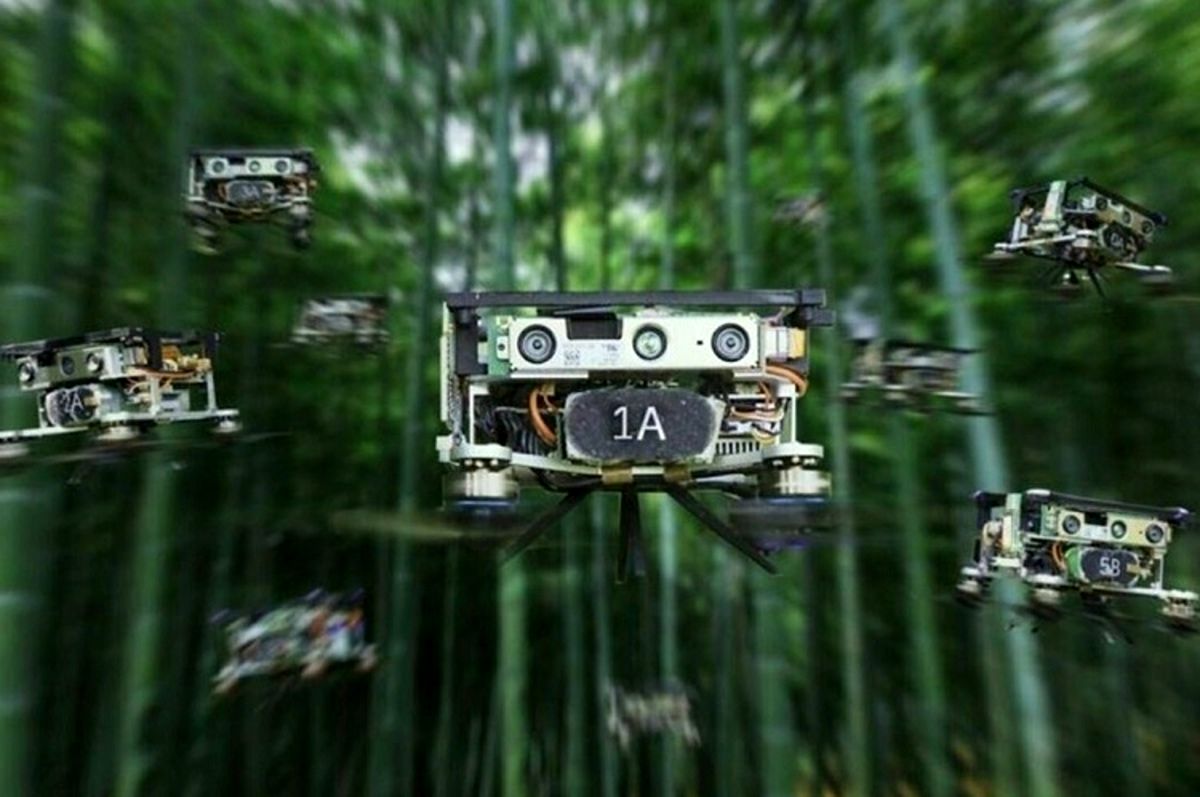
ما پیش از این نیز شاهد ازدحام پهپادها بوده ایم. به این صورت که پهپادها در یک آرایش قابل تنظیم پرواز میکردند، از موانع عبور میکردند و مسیر حرکت آنها توسط یک کامپیوتر مرکزی کنترل میشد. اما طراحی پهپادهایی که میتوانند حرکات خود را بدون هیچ گونه عملکرد سازماندهی مرکزی هماهنگ کنند، دشوار است. با این حال، محققان دانشگاه ژجیانگ در هانگژو چین موفق شدهاند ۱۰ پهپاد مستقل و هوشمند را در یک جنگل انبوه و ناآشنا به حرکت درآورند.
این رباتهای کوچک که به اندازه یک کف دست هستند، به دوربینهای عمقی سنسورهای ارتفاع و یک کامپیوتر آن برد مجهز شده اند. بزرگترین پیشرفت این ربات ها، استفاده از یک الگوریتم هوشمندانه برای جلوگیری از برخورد، افزایش کارایی پرواز و هماهنگی درون گروهی است. از آنجایی که این پهپادها به هیچ زیرساخت خارجی مانند GPS متکی نیستند، میتوان تعداد انبوهی از آنها را در هنگام وقوع بلایای طبیعی به کار گرفت. به عنوان مثال میتوان از آنها در بررسی آسیب ها، شناسایی محل ارسال کمک و یا مکانهای ناامن مناطق زلزله زده استفاده کرد. مطمئناً استفاده از پهپادهای منفرد در چنین سناریوهایی امکان پذیر است، اما با توجه به زمان محدود پرواز، مطمئنا رویکرد ازدحامی بسیار کارآمدتر خواهد بود.
این اقدام گامی بزرگ به سمت استفاده از گروههای این چنینی برای مواردی مانند نقشه برداری هوایی و واکنش به بلایا خواهد بود. به این منظور یک برنامه ریز، مسیری را طراحی کرده است که کاملاً بر دادههای حسگرهای ازدحام داخلی متکی است. این حسگرها اطلاعات را به صورت محلی پردازش کرده و با یکدیگر به اشتراک میگذارند. پهپادها میتوانند برای رسیدن به اهداف مختلفی مانند حفظ فاصله مشخص از موانع و یا به حداقل رساندن کل زمان پرواز بین دو نقطه برنامه ریزی شوند. کاربردهای بی شماری برای این نوع حرکت پهپادها در دنیای واقعی وجود دارد؛ از جمله نقشهبرداری هوایی برای کارهای حفاظتی و امدادرسانی در بلایای طبیعی و یا در زمان جنگ.
این فناوری باید به بلوغ برسد تا رباتهای پرنده بتوانند بدون برخورد با یکدیگر با اشیا و محیطهای جدید سازگار شوند و امنیت عمومی را به خطر نیندازند. "انریکا سوریا" متخصص رباتیک مؤسسه فناوری فدرال لوزان سوئیس که در این تحقیق مشارکتی نداشت، میگوید: «ازدحام پهپادها در گذشته نیز مورد آزمایش قرار گرفته اند؛ اما در محیطهای باز و بدون مانع و یا با مشخص کردن مکان موانع. این اولین بار است که گروهی از پهپادها میتوانند با موفقیت در یک محیط باز و بدون ساختار پرواز کنند.»











